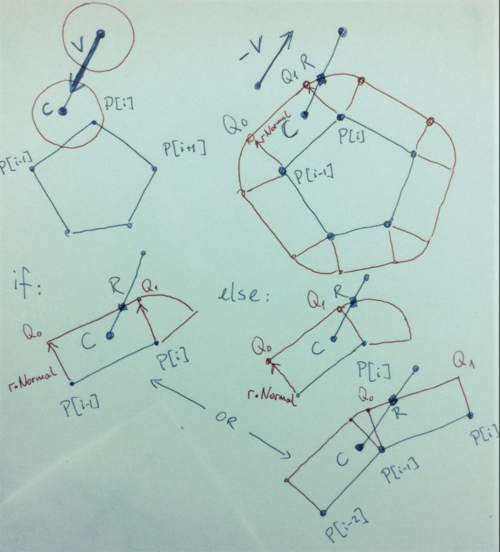
概括這個問題是用 JavaScript 寫的,但是用任何語言、偽代碼或數學來回答都會很棒!我一直在嘗試實現分離軸定理來完成以下任務:檢測凸多邊形和圓之間的交點。找出可應用于圓的平移以解決相交問題,使圓幾乎不接觸多邊形,但不再在內部。確定碰撞的軸(問題末尾的詳細信息)。我已成功完成第一個要點,您可以在問題末尾看到我的 javascript 代碼。我在其他部分有困難。解決交集網上有很多關于如何解決圓最小/最短重疊方向上的交點的例子。您可以在最后的代碼中看到我已經計算過了。但是,這不適合我的需要。我必須解決與圓軌跡相反方向的碰撞(假設我已經有了圓的軌跡,并希望將它作為單位向量或角度傳遞給我的函數,以適合者為準)。您可以在下圖中看到最短分辨率和預期分辨率之間的差異:如何計算最小平移向量以解決test_CIRCLE_POLY函數內部的交點,但這將應用于特定方向,與圓的軌跡相反?我的想法/嘗試:我的第一個想法是在必須在 SAT 算法中測試的軸上添加一個附加軸,該軸將垂直于圓的軌跡。然后我會在投影到這個軸上時根據重疊來解決。這會有點工作,但在大多數情況下會解決得很遠。它不會導致最低翻譯。所以這不會令人滿意。我的第二個想法是繼續使用最短重疊的幅度,但將方向更改為與圓的軌跡相反。這看起來很有希望,但可能有很多我沒有考慮到的極端情況。也許這是一個不錯的起點。確定碰撞側/軸我想出了一種方法來確定圓與多邊形的哪些邊相撞。對于多邊形的每個測試軸,我會簡單地檢查重疊。如果有重疊,那一側就會發生碰撞。這個解決方案將不再被接受,因為我只想根據圓的軌跡找出一側。我的預期解決方案會告訴我,在下面的示例圖像中,軸 A 是碰撞軸,而不是軸 B。這是因為一旦解決了交點,軸 A 就是對應于多邊形邊的軸只是勉強接觸到圓圈。我的想法/嘗試:目前我假設碰撞軸垂直于 MTV(最小平移向量)。這目前是不正確的,但是一旦我在問題的前半部分更新了交叉點解析過程,它應該是正確的軸。所以這部分應該首先解決?;蛘?,我考慮從圓的先前位置及其當前位置+半徑創建一條線,并檢查哪些邊與這條線相交。但是,仍然存在歧義,因為有時會有不止一側與線相交。
SAT Polygon Circle Collision - 解決速度方向的交點并確定碰撞的一側
侃侃無極
2022-10-08 15:10:47